LIDAR Constrained NeRF on Outdoor Scenes
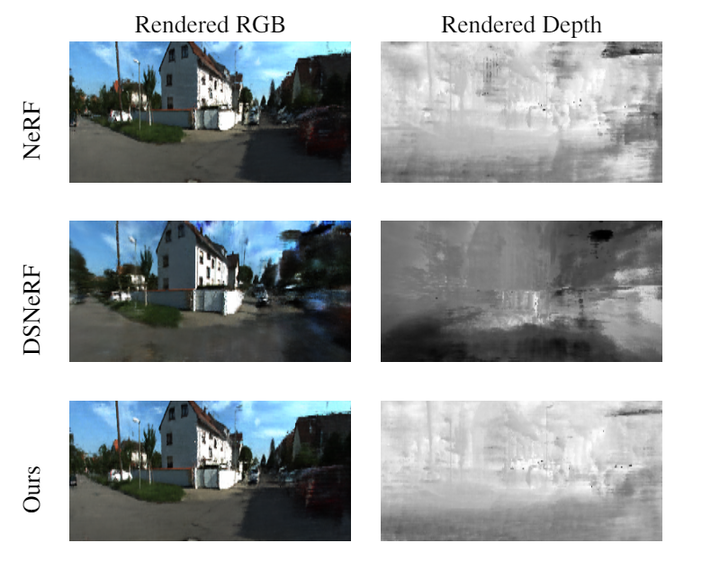 Depth Map comparisons
Depth Map comparisons
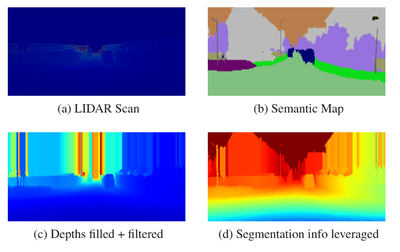
The goal of this project was to extend the NeRF architecture to make it work on outdoor scenes. In our case, we focused on autonomous driving scenarios with the KITTI-360 dataset. As baseline we built upon the DS-NeRF architecture and adapted it to work on LIDAR data and NDC space to deal with unbounded scenes. The main methods we have tried were:
- Depth Extrapolation + Inverse Depth Smoothness Loss as a regularizer
- Semantic Segmentation Loss to guide the optimization process
- Feature Loss (using a pre-trained VGG19 to create feature vectors)
Yiğit Aras Tunalı
MSc. Student at Technische Universität München
My research interests include Computer Vision, Computer Graphics, Machine Learning and Simulations.