Kinect Fusion: Dense Surface Mapping and Tracking
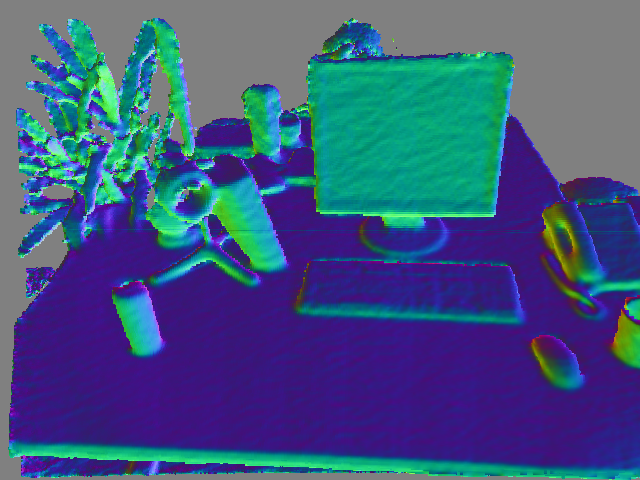 Predicted normals on TUM RGBD dataset
Predicted normals on TUM RGBD dataset
Implementation of the Kinect Fusion paper using C++ and CUDA to reconstruct 3D static scenes. The main goal of the implementation was leveraging the compute power of a GPU to run the algorithm in real-time. Implementation was done from scratch, staying faithful to the algorithms in the paper. Some main points that were dealt with in this project:
- Iterative Closest Points algorithm to match keypoints with the reconstructed geometry and the current frame.
- Updating the TSDF representation using the predicted camera poses and depth values
- Raycasting to reconstruct the surface
Following are some GIFs from the results:
Yiğit Aras Tunalı
MSc. Student at Technische Universität München
My research interests include Computer Vision, Computer Graphics, Machine Learning and Simulations.